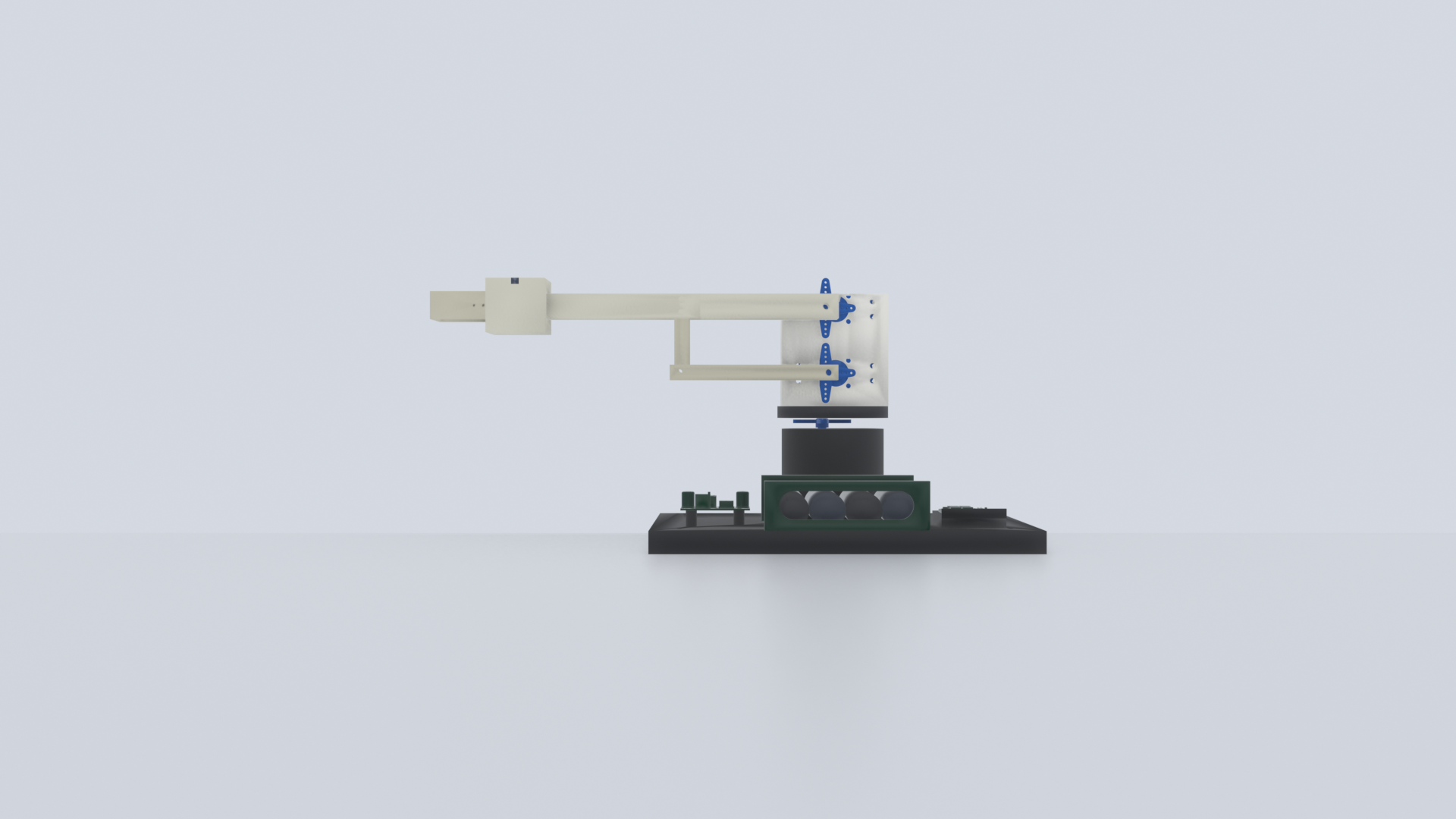
byitl's 2026 robot arm is a from-scratch rebuild grounded on Carlo Franciscone's EEZYbotARM Mk2 — a 1:7-scale homage to the ABB IRB460 palletizer. The previous open-frame two-segment arms were replaced with a proper four-bar parallelogram mechanism so the forearm tracks horizontal automatically as the shoulder pitches.
The change
- Four-bar parallelogram — bicep + parallel rod + coupling rod + bracket ground link. The forearm stays horizontal regardless of shoulder angle, exactly as the IRB460 does in real industry.
- Stacked U-bracket with both shoulder and elbow MG996Rs on the same +Y wall. Servos slide in from the open -Y face during assembly; flange ears press against the inner wall face; shafts poke out 18 mm thru-holes that clear the MG996R gear-box housing (not just the spline).
- Probe-first horn placement — horn XY positions read off the actual STEP bake centroid rather than the nominal joint axis. The bake's −7.22 mm X centroid offset puts the real shaft at world X=+7.21, where the horn now lives.
- L-shape jaw gripper — two printed L-jaws (long finger + 90° claw at the tip) pivot on M2 hinges. A printed horn-link mounts on the SG90 spline and pins into one jaw's linkage hole to drive the closure.
- Yaw column with 18650-class cells + electronics tray in the base — Feather ESP32-C6 control, PCA9685 16-channel servo driver, LM2596 buck, 4S BMS, and the cell pack all visible and serviceable from the top.
What's in the pack
Print-ready STL for every printed part (base, column, turntable, shoulder bracket, bicep, parallel rod, coupling rod, forearm, gripper base, jaws, gripper horn-link, cell holder), editable STEP, six angle renders + interactive WebGL viewer, a complete BOM with verified vendor pricing, and an assembly guide that walks the EEZYbotARM topology.